




| EN BREF |
|
Dans le domaine de la robotique, les avancées technologiques ne cessent de repousser les limites de ce qui est possible. Une innovation récente, développée par des chercheurs des universités de Stanford et Simon Fraser, promet de transformer notre interaction avec les robots humanoïdes. Ce système, connu sous le nom de TWIST, utilise des technologies de pointe telles que le MoCap et l’apprentissage par renforcement pour imiter en temps réel les mouvements humains. Cette approche ouvre de nouvelles perspectives, non seulement pour la téléopération, mais aussi pour la collaboration homme-robot dans des environnements complexes.
Système avancé de téléopération
La téléopération, qui permet le contrôle à distance en temps réel des robots, trouve des applications prometteuses dans de nombreux domaines. Les ingénieurs se concentrent de plus en plus sur des systèmes qui permettent de contrôler les robots humanoïdes en reflétant les mouvements corporels humains dans leur intégralité. L’objectif est de doter les robots d’une dextérité corporelle complète, semblable à celle des humains. Par exemple, dans des environnements complexes comme une cuisine encombrée, les humains utilisent naturellement tout leur corps pour accomplir des tâches variées.
Le système TWIST repose sur la technologie de capture de mouvement (MoCap) pour suivre précisément les mouvements humains et permettre un contrôle en temps réel des robots humanoïdes. En combinant ces données avec l’apprentissage par renforcement, le système forme un contrôleur qui traduit les actions humaines en mouvements robotiques équilibrés et complets. Ce processus permet au robot de mimer de près les mouvements de l’utilisateur, tout en gérant des défis tels que les délais et les mouvements saccadés grâce à un processus d’entraînement en deux étapes.
Des robots humanoïdes plus intelligents
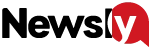
Les chercheurs ont testé leur système de téléopération dans des expériences réelles en utilisant le robot humanoïde G1 de Unitree Robotics. Le système a démontré son efficacité en permettant un contrôle en temps réel du robot et montre un potentiel d’utilisation avec d’autres humanoïdes tels que le T1 de Booster Robotics. L’un des principaux enseignements de cette recherche est que les données de mouvement corporel humain complet sont suffisamment puissantes pour contrôler toutes les parties d’un robot humanoïde, y compris les jambes, les pieds, la taille, les genoux et les coudes.
Ce niveau de contrôle permet aux robots d’exhiber une dextérité corporelle complète, semblable à celle des humains. Les chercheurs envisagent d’utiliser ces capacités pour permettre aux humains de contrôler les humanoïdes afin de collecter de grandes quantités de données, essentielles pour entraîner des modèles robotiques de base. Toutefois, TWIST doit encore surmonter certains défis, notamment l’absence de retour visuel et tactile pour les opérateurs et la durabilité limitée des matériels actuels.
Applications potentielles et défis futurs
Selon les chercheurs, avec un développement continu, le système pourrait être déployé dans des scénarios réels, permettant aux robots d’effectuer des tâches manuelles dans des environnements dangereux ou de prendre en charge des emplois industriels nécessitant une grande précision. L’ambition ultime est de rendre les robots humanoïdes vraiment intelligents et capables d’accomplir des tâches du monde réel. Pour cela, l’équipe prévoit d’étendre la collecte de données et de permettre aux robots d’acquérir des compétences autonomes.
Malgré les promesses de TWIST, plusieurs défis restent à relever. Les futurs travaux viseront à améliorer le retour d’informations pour les opérateurs, à renforcer la fiabilité du matériel, et à adopter l’estimation de pose basée sur RGB pour remplacer le MoCap, rendant ainsi cette technologie plus accessible et portable.
Perspectives futures de la robotique humanoïde
Les détails de cette recherche ont été publiés sur le serveur de préimpression arXiv, fournissant une base solide pour de futures innovations dans le domaine de la robotique humanoïde. L’impact potentiel de TWIST sur l’industrie et la recherche est immense, et cette technologie pourrait bien changer la manière dont nous interagissons avec les machines dans les années à venir.
Alors que les chercheurs continuent d’affiner cette technologie, une question demeure : comment les avancées dans la téléopération des robots humanoïdes transformeront-elles notre quotidien et nos environnements de travail à l’avenir ?
Ça vous a plu ? 4.6/5 (20)


Impressionnant! Mais est-ce que ce système TWIST peut vraiment remplacer un humain dans des tâches complexes? 🤔